贝叶斯曲线拟合#
公式 1.68:预测分布的积分定义
p(t∣x,x,t)=∫模型预测p(t∣x,w)⋅参数后验p(w∣x,t)dw
- p(t∣x,x)是最终我们想预测的联合概率
- p(t∣x,w)是以w为参数时我们对t的预测
- p(w∣x,t)则体现了我们对参数取w的信任程度
我们将所有可能的w算一遍p(t∣x,w),然后根据我们对该w的信任程度后验概率 p(w∣…))进行加权求和(积分),得到最终的联合概率。
这体现了这样一种思想:
我们不是要找一个“最优的参数”来预测,而是要综合所有可能的参数来预测。
即
新的预测 t 的概率分布 = ∑ ( 某个特定参数 w 下的预测 × 我们有多信任这个 w )
公式 1.69:预测分布的形式
(这里假定了先验和似然都是高斯分布)
p(t∣x,x,t)=N(t∣m(x),s2(x))
公式 1.70:预测均值
m(x)=mNTϕ(x)
- 解释:新的预测均值 = 后验均值参数 mN × 基函数 ϕ(x)。
- 这和点估计(MAP)的结果是一样的。也就是说,虽然我们考虑了所有 w,但在预测的“中心位置”上,还是那个最可能的参数说了算。
公式 1.71:预测方差(核心公式!)
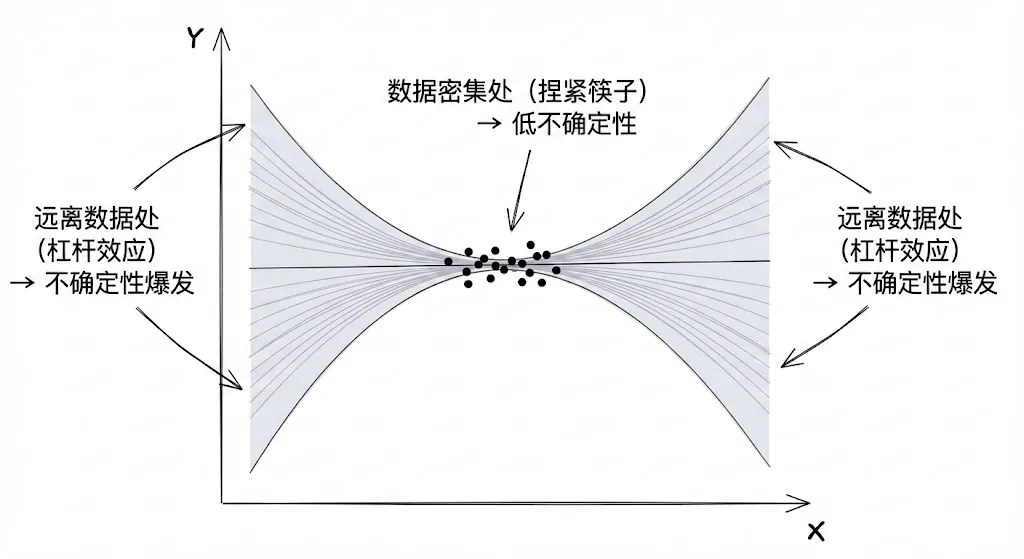
s2(x)=数据噪声β1+参数不确定性ϕ(x)TSNϕ(x)
- 解释:预测的不确定性(方差)由两部分组成:
- 数据固有的噪声 (β1):即使模型完美,数据本身也有随机误差,这部分无法消除。
- 模型参数的不确定性 (ϕ(x)TSNϕ(x)):这是贝叶斯独有的。
- SN 是参数 w 的协方差矩阵/
- 这就解释了为什么贝叶斯回归的置信区间呈现**“香肠状”**:在数据密集的地方,参数估计准(SN 作用小),方差小;在远离数据的地方,方差会变大。
维度灾难(Curse of dimensionality)#
低维度上的很多直觉不能直接拓展到高维度上。
考虑D维空间中半径为r的球体在r = 1 - ϵ到r = 1之间的部分在球的总体积中的占比。
D维空间中体积正比于rD
VD(r)=KDrD
VD(1)VD(1)−VD(1−ϵ)=1−(1−ϵ)D
当D趋于无穷大,即使ϵ很小,占比也趋近于1.
因此在高维空间中,球体大部分的体积集中于在球体表面附近的薄壳中。
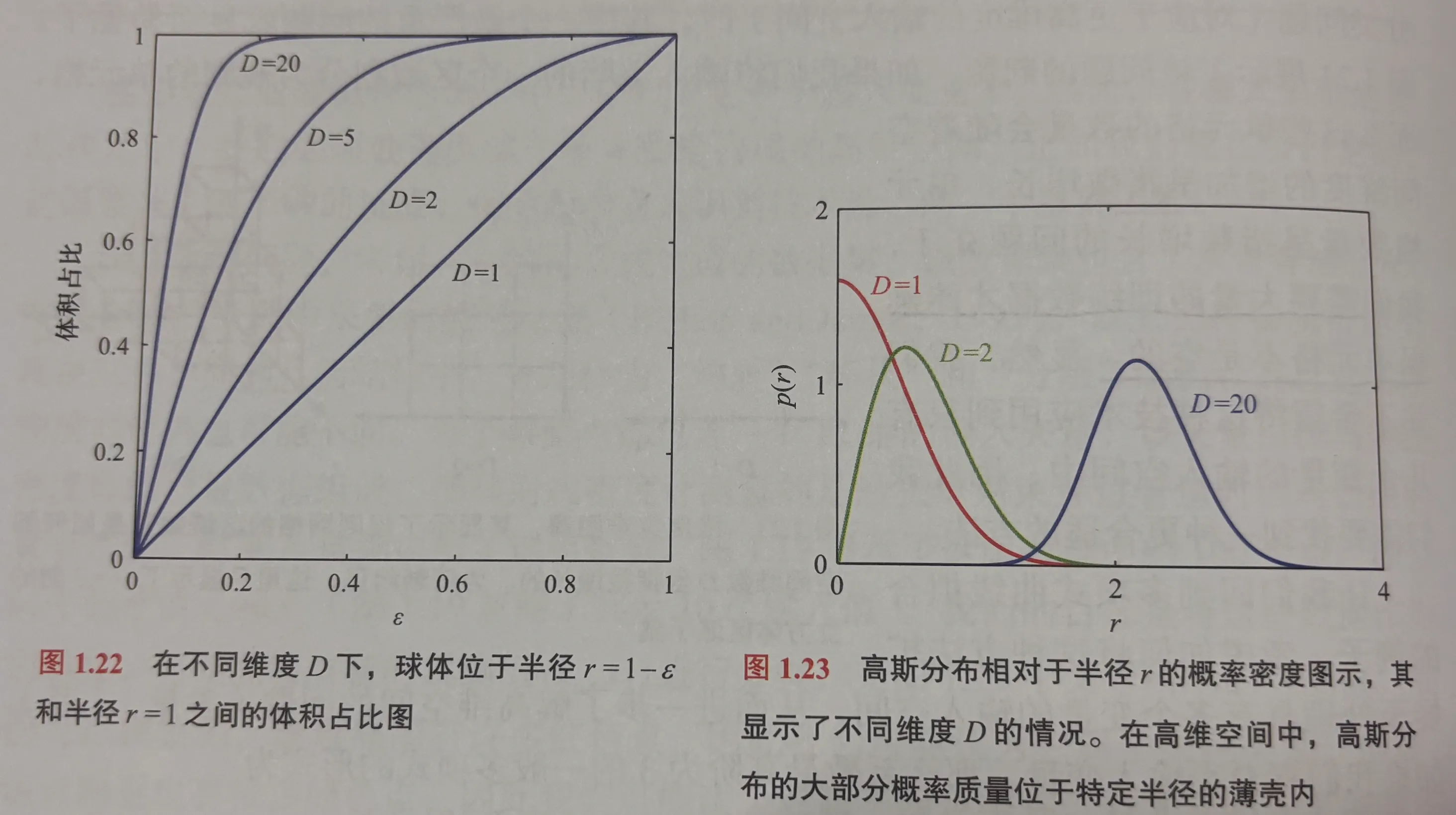
考虑一个多维度的高斯分布,其类似于一个球。
虽然单看一个维度中间部份的“密度”最大,但高维情况下,大部分质量仍然在一个空心球壳附近,所以如果随机取数,也更有可能取在这个球壳上。
“高斯薄壳”的密度峰值:
r^≃Dσ
这引出一个可怕的后果:
在很多机器学习算法(如 KNN、K-Means)中,我们依赖**“距离”**来判断相似度。 但是因为这个“薄壳效应”:
- 所有随机样本都落在同一个半径的壳上。
- 这就导致所有点之间的距离看起来都差不多!
- “最近邻”和“最远邻”的区别变得微乎其微,导致基于距离的算法在高维空间失效。
不要用三维直觉去想象高维空间,高维空间里,中心是空的,大家都在壳上。